平整度可控的大面积工业厂房地坪施工装置及施工方法与流程
1.本发明属于建筑施工领域,具体涉及平整度可控的大面积工业厂房地坪施工装置及施工方法。
背景技术:
2.随着目前工业建筑的集成化及流水化程度越来越高,工业化厂房单层建筑面积越来越大,且部分高精度车间对地面平整度要求特别高,对施工工艺提出了更高的要求。传统的大面积混凝土地坪平整度控制多采用在混凝土基层或结构层上做灰饼或者简易的模板分割支模的方法。该传统工艺施工的地坪不能满足现代化工业厂房对地坪平整度的要求,并且后期经常显现大面积裂缝,积水,地坪质感较差;另外,这种传统工业施工进度较为缓慢,耗费大量人工。混凝土施工受工人素质和经验的影响较大,较难控制施工平整度质量;目前厂房建筑单体面积较大,无法保证每个区域都要配电箱,拖拉电箱费时费力。
技术实现要素:
3.针对上述背景技术中存在的问题,本发明提供了一种简易施工预留洞口封堵模板安装结构及安装方法,简单实用,效果好。
4.为实现上述目的,本发明提供如下技术方案:
5.本发明平整度可控的大面积工业厂房地坪施工装置,它包括两个平行间隔设置的可调支撑平台和设置在两个可调支撑平台上的混凝土摊铺振动找平装置;每个可调支撑平台包括长条状的支撑平台,支撑平台上沿长度方向均匀贯穿设置有若干螺杆,螺杆通过上螺母和下螺母与支撑平台的两侧可调节连接固定,螺杆的底部设置有底座;所述混凝土摊铺振动找平装置包括平整板,平整板两端底部分别通过设置驱动轮可移动设置在两个支撑平台上,顶部设置有控制装置和若干附着振动器,其底部设置有若干竖向振动棒;所述控制装置分别与驱动轮、竖向振动棒和附着式振动器相连接。
6.进一步地,所述控制装置包括连接有蓄电池的控制器,控制器上通过线路连接有驱动装置,驱动装置与各驱动轮相连,各所述竖向振动棒和各附着振动器分别通过线路接入控制器。
7.进一步地,还包括无线收发器和无线遥控器,无线收发器通过线路接入控制器。
8.进一步地,所述支撑平台的上表面通过竖向设置两根滑槽挡板形成滑槽,所述驱动轮设置于滑槽内。
9.进一步地,每个所述支撑平台上的滑槽为两个,所述平整板每端底部的驱动轮为两个,分别设置于支撑平台上的两个滑槽内。
10.进一步地,所述平整板每侧端部设置为呈“l”型的限位板,驱动轮设置于限位板的底部,限位板的端部低于滑槽挡板的顶部。
11.本发明平整度可控的大面积工业厂房地坪施工方法,通过上述技术方案所述的平整度可控的大面积工业厂房地坪施工装置进行,步骤如下:
12.s1:施工准备,采用激光平地仪对所需要施工的地坪区域进行分块弹线;
13.s2:测设标高控制线,并对楼地面所有控制线进行二次闭合测量,保证楼地面所有控制线在同一水平面上;
14.s3:在分块线的位置设置可调支撑平台,调整各螺杆上支撑平台的高度并通过上螺母和下螺母初步固定;
15.s4:在支撑平台上安装混凝土摊铺振动找平装置,将各驱动轮分别放置对应的滑槽内,调整螺杆的上、下螺母,使得混凝土摊铺振动找平装置中的平整板的高度处于设计位置;
16.s5:在需要施工的地坪区域采用电动自卸车将混凝土运输摊铺行驶路线前,启动混凝土摊铺振动找平装置,沿滑槽移动并通过平整板、竖向振动棒和附着式振动器进行地坪振捣浇筑找坡;
17.s6:一个区块浇筑完成后,拆除可调支撑平台和混凝土摊铺振动找平装置移至下一区块,并按上述方式进行浇筑;
18.s7:已浇筑区块进行覆盖薄膜保湿养护,并及时进行切缝施工。
19.进一步地,所述s1中分块宽度为2m。
20.进一步地,所述s7中,当混凝土强度达到设计强度的25%时,使用切缝机对地坪切缝施工。
21.相对于现有技术,本发明所述的平整度可控的大面积工业厂房地坪施工装置及施工方法应用后,不仅可以对工业厂房地坪进行标高精准控制,而且同步可以进行混凝土表面及深度振捣,从而进一步减少了后期因混凝土不密实导致塌陷和裂缝产生,进一步提高地坪平整度,提高厂房地坪使用寿命和使用性能。
附图说明
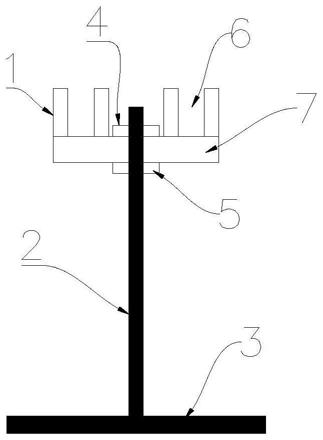
22.图1为本发明中可调支撑平台的结构示意图;
23.图2为本发明中平整度可控的大面积工业厂房地坪施工装置的结构示意图;
24.图3为本发明中控制装置的示意图;
25.图中:1、滑槽挡板;2、螺杆;3、底座;4、上螺母;5、下螺母;6、滑槽;7、支撑平台;8、滑轮;9、平整板;10、竖向振动棒;11、控制装置;12、附着式振动器;13、控制器;14、蓄电池;15、无线收发器;16、驱动装置;17、无线遥控器;18、限位板。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另作定义,此处使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开专利申请说明书以及权利要求书中使用的“上”、“下”、“左”、“右”、“前”、“后”、“内”、“外”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直
接的还是间接的。本发明未详述之处,均为本技术领域技术人员的公知技术。
27.实施例1:
28.请参阅图1和图2所示,本发明平整度可控的大面积工业厂房地坪施工装置,其特征在于:包括两个平行间隔设置的可调支撑平台和设置在两个可调支撑平台上的混凝土摊铺振动找平装置;每个可调支撑平台包括长条状的支撑平台7,支撑平台7上沿长度方向均匀贯穿设置有若干螺杆2,螺杆2通过上螺母4和下螺母5与支撑平台7的两侧可调节连接固定,用于调整支撑平台7的高度,螺杆2的底部设置有底座3;所述混凝土摊铺振动找平装置包括平整板9,平整板9两端底部分别通过设置驱动轮8可移动设置在两个支撑平台7上,顶部设置有控制装置11和若干附着振动器12,其底部设置有若干竖向振动棒10,附着振动器12和竖向振动棒10分别用于对混凝土的表面及深度振捣;所述控制装置11分别与驱动轮8、竖向振动棒10和附着式振动器12相连接,用于驱动驱动轮8带动混凝土摊铺振动找平装置移动,以及控制竖向振动棒10和附着式振动器12启动或关闭。
29.本实施例中,所述控制装置11包括连接有蓄电池14的控制器13,控制器13上通过线路连接有驱动装置16,驱动装置16与各驱动轮8连接,各所述竖向振动棒10和各附着振动器12分别通过线路接入控制器13。本实施例中,蓄电池14可以为锂电池,用于在大面积工业厂房内,因无法保证每个区域都设置配电箱时进行使用;所述的驱动装置16用于带动各驱动轮进行转动。
30.本实施例中,还包括无线收发器16和无线遥控器17,无线收发器16通过线路接入控制器13,可以通过无线的方式对混凝土摊铺振动找平装置进行控制。
31.本实施例中,为便于对驱动轮8进行限位以及确保驱动轮8不会从支撑平台7上脱落,所述支撑平台7的上表面通过竖向设置两根滑槽挡板4形成滑槽6,所述驱动轮8设置于滑槽6内。
32.进一步地,每个所述支撑平台7上的滑槽6为两个,所述平整板9每端底部的驱动轮8为两个,分别设置于支撑平台7上的两个滑槽6内。
33.本实施例中,所述平整板9每侧端部设置为呈“l”型的限位板18,驱动轮8设置于限位板18的底部,限位板18的端部低于滑槽挡板4的顶部,确保混凝土摊铺振动找平装置使用时的稳定性。
34.实施例2:
35.本发明平整度可控的大面积工业厂房地坪施工方法,通过实施例1所述的平整度可控的大面积工业厂房地坪施工装置进行,步骤如下:
36.s1:施工准备,采用激光平地仪对所需要施工的地坪区域进行分块弹线,分块宽度控制在2m;
37.s2:测设标高控制线,并对楼地面所有控制线进行二次闭合测量,保证楼地面所有控制线在同一水平面上;
38.s3:在分块线的位置设置可调支撑平台,调整各螺杆2上支撑平台7的高度并通过上螺母4和下螺母5初步固定;
39.s4:在支撑平台7上安装混凝土摊铺振动找平装置,将各驱动轮8分别放置对应的滑槽6内,调整螺杆2的上、下螺母4、5,使得混凝土摊铺振动找平装置中的平整板9的高度处于设计位置;
40.s5:在需要施工的地坪区域采用电动自卸车将混凝土运输摊铺行驶路线前,启动混凝土摊铺振动找平装置,沿滑槽6移动并通过平整板9、竖向振动棒10和附着式振动器12进行地坪振捣浇筑找坡;
41.s6:一个区块浇筑完成后,拆除可调支撑平台和混凝土摊铺振动找平装置移至下一区块,并按上述方式进行浇筑;
42.s7:已浇筑区块进行覆盖薄膜保湿养护,并当混凝土强度达到设计强度的25%时,及时使用切缝机对地坪切缝施工。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种多功能的吊顶型材的制作方...
- 一种带有灯槽的吊顶型材的制作...
- 一种建筑楼板辅助支撑柱体的制...
- 一种可调的建筑施工界面剂辅助...
- 一种大理石加工机床清洁排屑装...
- 一种建筑垃圾再生砖成型装置的...
- 一种建筑幕墙安装结构及安装方...
- 混凝土布料系统及其布料方法与...
- 一种易于调平的建筑施工架及其...
- 地板和用于制造地板的方法与流...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1