一种可变形小型四旋翼四足飞爬机器人及其控制方法与流程
1.本发明属于机器人技术领域,具体涉及一种可变形小型四旋翼四足飞爬机器人及其控制方法。
背景技术:
2.微小型机器人是一项多学科交叉的高精尖技术,其尺寸小、质量轻、机动性高,在现代多应用领域展示出极大的潜在优势和应用价值,成为了当今先进国家的科技前沿课题。目前,微小型机器人的研究还处于初级发展阶段,尤其是厘米级机器人的研究与设计,距离真正小型化和智能化还有很大差距,机器人自身质量、尺寸、驱动器功率等方面的严格限制带来了极大挑战性。随着陆空高危场景的日趋复杂,仅仅依靠单一的运动形态已经不足以满足现实执行任务的操作需求。受自然界生物启发,昆虫作为一类高机动性、高适应性的动物,大多都具有飞行以及爬行两种运动形态,模仿其外形结构和运动特性是提升机器人空地协同运动能力的有效方法。
3.现有技术中,论文zhang r.,wu y.,zhang l.,xu c.,and gao f.,autonomous and adaptive navigation for terrestrial-aerial bimodal vehicles,ieee robotics and automation letters,2022,7(2):3008-3015.中提出了一种基于四旋翼的轮式机器人,包括两个被动轮和一个可倾转四旋翼,并能通过运动规划和控制算法在飞行和滚动两种运动模态之间进行自主切换。授权公告号为cn108502044b的中国专利公开了一种组合分离式旋翼与足式移动操作机器人,包括多旋翼飞行机构、多足步行操作机构,以及实现多旋翼飞行机构与多足步行操作机构两者结合与分离的组合分离机构。组合分离机构包括上连接模块与下连接模块,分别安装于多旋翼飞行机构底部与多足步行操作机构顶部,通过两者间锁定配合,可实现空中飞行、支撑面飞爬、陆地攀爬行走以及相应的操作功能,并可通过机器人机构的组合分离,完成多模式空地协同作业。
4.以上所提出的飞爬机器人均具有陆空两栖运动能力,但是属于组合式结构,组合式飞爬机器人采用简单的组合构型,结构相对复杂、自重大、体积大、集成度低、空气阻力大,导致飞行机动性能大大减弱。
技术实现要素:
5.本发明的目的在于针对上述问题,提出一种可变形小型四旋翼四足飞爬机器人及其控制方法,可根据环境条件自适应地变换相应的运动模态,具有小型轻量化、空气阻力小、隐蔽性好、越障性能好、续航时间长的优点,在复杂陆空作业环境下具有较好的机动性和适应性,可满足小型化的侦察需求和复杂陆空环境的作业需求。
6.为实现上述目的,本发明所采取的技术方案为:
7.本发明提出的一种可变形小型四旋翼四足飞爬机器人,包括机身、四个旋翼组件和四个腿部组件,其中:
8.机身,包括安装座、以及均安装于安装座上的飞爬控制模块、调节模块和电池,调
节模块包括电源模块和电调,电池、电源模块、飞爬控制模块和电调依次电连接;
9.腿部组件,用于实现至少两个自由度的转动,包括至少两个腿节、至少两个关节驱动舵机和一个轮腿切换组件,各关节驱动舵机与腿节一一对应连接并与飞爬控制模块电连接,各腿节依次连接并通过对应的关节驱动舵机驱动旋转,轮腿切换组件包括滚轮和脚掌,脚掌与滚轮的转动轴转动连接,通过旋转脚掌切换腿部组件的末端为脚掌或滚轮,各腿部组件呈矩形分布于安装座上,并通过对应连接的关节驱动舵机驱动实现绕安装座的水平摆动;
10.旋翼组件,包括螺旋桨和电机,螺旋桨通过电机驱动旋转,电机与腿部组件一一对应,并固定于腿部组件上除安装座所连腿节之外的其余任一腿节上,电机还与电调电连接,在空中飞行模式下,螺旋桨处于水平状态,腿部组件在“t”型、“h”型、“o”型、“x”型四种飞行运动模态之间转换。
11.优选地,安装座包括多个连接杆和依次设置且相互平行的第一支撑板、第二支撑板和第三支撑板,第一支撑板和第二支撑板连接,连接杆的两端分别与第二支撑板和第三支撑板连接,飞爬控制模块安装于第一支撑板上,调节模块穿设于第二支撑板上,电池位于第二支撑板和第三支撑板之间。
12.优选地,旋翼组件还包括与电机连接的限位支撑板,用于实现与旋翼组件所连腿节的转动限位。
13.优选地,腿节为两个,包括大腿节和小腿节,关节驱动舵机为两个,包括髋关节驱动舵机和膝关节驱动舵机,髋关节驱动舵机与安装座连接,并用于驱动大腿节绕安装座水平摆动,膝关节驱动舵机用于驱动小腿节绕大腿节上下摆动,轮腿切换组件设于小腿节的末端。
14.优选地,大腿节的水平摆动范围为180
°
,小腿节的上下摆动范围为90
°
。
15.优选地,各螺旋桨在水平状态下沿高度方向错位分布。
16.优选地,螺旋桨还设有筒状保护罩,并通过螺旋桨推进实现筒状保护罩的轮式运动或吸附运动。
17.优选地,脚掌的末端设有爪刺机构或黏附机构。
18.优选地,可变形小型四旋翼四足飞爬机器人搭载有视觉传感器、听觉传感器、嗅觉传感器和触觉传感器至少其一,各传感器与飞爬控制模块电连接。
19.一种可变形小型四旋翼四足飞爬机器人的控制方法,包括如下步骤:
20.s1、分别构建飞爬机器人的四旋翼动力学模型和四足动力学模型;
21.s2、采用在线系统辨识方法确定四旋翼动力学模型在不同飞行运动模态下的螺旋桨升力系数k
t
;
22.s3、确定空中飞行模式的飞行运动模型,飞行运动模型包括静态飞行运动模型和动态飞行运动模型,静态飞行运动模型采用“前馈+pd反馈”控制方式来实现四旋翼动力学模型的“x”型飞行运动模态,动态飞行运动模型采用升力补偿算法来实现四旋翼动力学模型的“t”型、“h”型或“o”型飞行运动模态,其中:
[0023]“前馈+pd反馈”控制方式满足如下公式:
[0024]
[0025]
式中,u(t)为四旋翼动力学模型的输入量,x(t)为四旋翼动力学模型的状态量,e(t)为四旋翼动力学模型的误差量,为与四旋翼动力学模型相关的常系数,k
p
为控制器的比例系数,kd为控制器的微分系数,为前馈项,为pd反馈项;
[0026]
升力补偿算法满足如下公式:
[0027][0028][0029]
t=k(φ)w2[0030]
式中,t为单个螺旋桨的升力,φ为螺旋桨变形后的遮挡角度,ω为螺旋桨的角速度,k(φ)为遮挡角度相关函数,为补偿后的期望电机速度,k是取决于遮挡角度相关函数k(φ)的伸缩因子,k
t
为升力系数且等于k(φ=0);
[0031]
s4、采用双层cpg网络和最近邻耦合模型来控制四足动力学模型的足端运动轨迹,双层cpg网络包括八个振荡器,并划分为用于控制髋关节的意识层和用于控制膝关节的行为层,最近邻耦合模型为:
[0032][0033]
其中,旋转矩阵定义为:
[0034][0035]
式中,i=1,2,3,4,j=1,2,m=1,2,3,4,n=1,2,x
mn
和y
mn
表示第m条腿部组件第n个关节的振荡器状态量,k’为耦合强度,且等于0.1,表示第mn个振荡器和第ij个振荡器之间的相位差;
[0036]
s5、基于ddpg强化学习算法训练双层cpg网络,获得训练好的行为层模型参数,ddpg强化学习的奖励函数r
t
公式如下:
[0037][0038]
其中,kv为正的速度权重系数,ke为正的扭矩权重系数,v
x
为水平速度,τ为关节扭矩,为关节角速度;
[0039]
s6、飞爬机器人根据实时采集的环境信息实现定位并构建地图进行路径规划,通过自适应地选择飞行运动模型或训练好的双层cpg网络控制飞爬机器人实现空中飞行运动
或地面爬行运动。
[0040]
与现有技术相比,本发明的有益效果为:
[0041]
1)该机器人通过结合空中旋翼组件和地面腿部组件,并将旋翼组件直接集成在腿部组件上形成一体式结构,构成带有四个可旋转腿节的四旋翼飞行器,使机器人自身具有陆空协同作业能力(如行走、飞行、爬壁、操纵和运输物体),兼具了飞行机器人的运动灵活性和足式机器人的地形适应性,能够实现在空中大范围、远距离的全局观察和地面小范围、近距离的精确定位,解决了飞行机器人的隐蔽性差和爬行机器人的移动速度慢的问题,提高了机器人在复杂陆空作业环境下的机动性和适应性,并实现轻量化、小型化、集成化、智能化,且空气阻力小、越障性能好、续航时间长,可满足小型化的侦察需求和复杂陆空环境的作业需求;
[0042]
2)采用可变形腿部组件并配合旋翼组件在空中飞行时产生不同的运动模态,如“t”型、“h”型、“o”型、“x”型等,根据环境条件自适应地变换相应的飞行运动模态,能够实现穿越狭窄受限区域和对目标物的超近距离观测等特殊操作任务,并具备抓取功能和垂直面爬壁功能;
[0043]
3)相较于现有技术中单一轮式或单一腿式的陆空两栖机器人,该装置设有轮腿切换组件,通过切换腿部组件的末端为滚轮或脚掌,具备高效灵活的运动速度和地面越障能力;
[0044]
4)通过建立空中飞行模式不同运动模态下的飞行运动模型和采用基于ddpg强化学习算法训练好的双层cpg网络实现飞爬机器人空地自主切换,产生在不同环境下的运动模态,提高空地运动的稳定性和多样性,实现智能化控制。
附图说明
[0045]
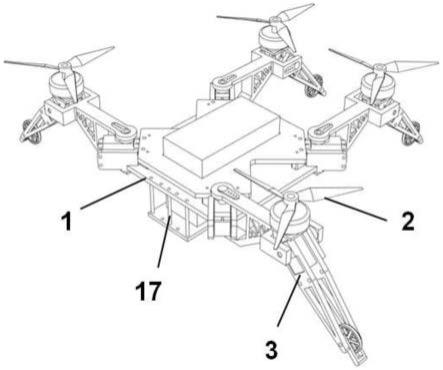
图1为本发明的飞爬机器人结构示意图;
[0046]
图2为本发明的机身结构示意图;
[0047]
图3为本发明的腿部组件切换为滚轮时的结构示意图;
[0048]
图4为本发明的腿部组件切换为脚掌时的结构示意图;
[0049]
图5为本发明飞爬机器人采用滚轮滑动时的结构示意图;
[0050]
图6为本发明飞爬机器人在空中飞行模式下的“h”型结构示意图;
[0051]
图7为本发明飞爬机器人在空中飞行模式下的“o”型结构示意图;
[0052]
图8为本发明的飞爬机器人地面爬行模式结构示意图;
[0053]
图9为本发明的飞爬机器人的动态变形穿越示意图;
[0054]
图10为本发明可变形小型四旋翼四足飞爬机器人的控制方法流程图。
[0055]
附图标记说明:1、机身;2、旋翼组件;3、腿部组件;11、第一支撑板;12、第二支撑板;13、第三支撑板;14、飞爬控制模块;15、调节模块;16、电池;17、连接杆;121、固定座;21、螺旋桨;22、电机;23、限位支撑板;31、髋关节驱动舵机;32、大腿节;33、膝关节驱动舵机;34、小腿节;35、轮腿切换组件;351、滚轮;352、脚掌。
具体实施方式
[0056]
下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0057]
需要说明的是,当组件被称为与另一个组件“连接”时,它可以直接与另一个组件连接或者也可以存在居中的组件。除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是在于限制本技术。
[0058]
实施例1:
[0059]
如图1-9所示,一种可变形小型四旋翼四足飞爬机器人,包括机身1、四个旋翼组件2和四个腿部组件3,其中:
[0060]
机身1,包括安装座、以及均安装于安装座上的飞爬控制模块14、调节模块15和电池16,调节模块15包括电源模块和电调,电池16、电源模块、飞爬控制模块14和电调依次电连接;
[0061]
腿部组件3,用于实现至少两个自由度的转动,包括至少两个腿节、至少两个关节驱动舵机和一个轮腿切换组件35,各关节驱动舵机与腿节一一对应连接并与飞爬控制模块电连接,各腿节依次连接并通过对应的关节驱动舵机驱动旋转,轮腿切换组件35包括滚轮351和脚掌352,脚掌352与滚轮351的转动轴转动连接,通过旋转脚掌352切换腿部组件3的末端为脚掌352或滚轮351,各腿部组件3呈矩形分布于安装座上,并通过对应连接的关节驱动舵机驱动实现绕安装座的水平摆动;
[0062]
旋翼组件2,包括螺旋桨21和电机22,螺旋桨21通过电机22驱动旋转,电机22与腿部组件3一一对应,并固定于腿部组件3上除安装座所连腿节之外的其余任一腿节上,电机22还与电调电连接,在空中飞行模式下,螺旋桨21处于水平状态,腿部组件3在“t”型、“h”型、“o”型、“x”型四种飞行运动模态之间转换。
[0063]
其中,为实现轻量化,各腿节可采用镂空机架,如与滚轮351连接的腿节可采用一体式双层镂空机臂,滚轮351的转动轴位于双层镂空机臂之间的空隙位置并与双层镂空机臂转动连接,滚轮351为被动轮,脚掌352与滚轮351的转动轴转动连接,如脚掌352的转动轴与滚轮351的转动轴共轴连接,通过旋转脚掌352切换腿部组件3的末端为脚掌352或滚轮351,脚掌352可为任意形状,当使用或回收时可通过与双层镂空机臂卡接限位,可手动切换。电调(即电子调速器),用于控制电机完成规定速度、动作。
[0064]
在不增加机械结构复杂性和降低平台可控性的前提下,该机器人采用更轻量化、更集成化的一体式结构:腿部组件在保证刚度的前提下采用镂空设计,并在每条单腿嵌入多个主动关节(通过关节驱动舵机实现)和一个被动关节(轮腿切换组件)的自由度;旋翼组件直接一一对应集成在腿部组件上形成一体式结构,构成带有四个可旋转腿节的四旋翼飞行器,四个腿部组件设置于对称分布于机身1对角线上,在主动关节上增加旋翼结构,实现动态可变形的飞行运动;在被动关节上增加辅助轮结构,实现光滑表面的快速运动。因此,该飞爬机器人通过自主调整即可实现陆空不同环境下的运动切换,展示出灵活的机动性能和环境自适应性能。
[0065]
通过空中动态变形产生不同的飞行运动模态(如“t”型、“h”型、“o”型、“x”型等),如通过“t”型运动模态更加贴近目标,通过“h”型运动模态实现抓取功能,以及扩展实现“四
腿变四爪”抓取功能,可以适用于不同的任务场景(例如:行走、狭窄空间飞行、垂直面爬壁、超近距离侦察、物体抓取和运输等),极大地提升了机器人的环境自适应性,克服了单一飞行机器人隐蔽性差和单一爬行机器人运动速度慢的劣势,运动平稳灵活且能耗低。
[0066]
在陆地时,当机器人螺旋桨角度调整为水平时,机器人便可以启动空中飞行模式,通过四个旋翼组件协作实现飞行,在空中可以自由选择不变形或者动态变形,动态变形即产生“t”型、“h”型、“o”型、“x”型等以适应不同环境,如图9所示:a为“x”型,b为“o”型,c为“h”型,d为“t”型,灰色方框代表障碍物,由a至d依次展示了飞爬机器人的动态穿越时的变形状态。本实施例中机器人起飞重量小于800g,整体变形尺寸在周向可缩小10厘米;在空中时,机器人可以自由垂直降落并迅速调整为地面爬行模式,通过四个腿部组件协作实现爬行,鉴于滚轮351为被动轮,在地面爬行是通过旋转脚掌352切换腿部组件3的末端为脚掌352;在垂直面爬行时,可动态变形为“t”型,并在四个旋翼组件驱动下行进。因此,该飞爬机器人可以在复杂陆空环境下进行自主切换,其能够在狭窄受限的环境进行动态变形穿越,且仿昆虫腿足结构能够在崎岖地形进行越障穿越。需要说明的是,该机器人还可通过防水设计,将螺旋桨21调整为垂直设置实现水上运动。
[0067]
可满足小型化的侦察需求,适应复杂陆空环境的作业需求,能够执行复杂高危环境(如丛林、山区、城市建筑群、远洋孤岛等)的救援、信息搜集等多种安防任务,而且在农业保护、森林防火、隧道检测和地质勘探、高空建筑和设备检测、灾后搜救、侦察、定位、追踪、巡逻、空地移动信号基站、隧道/管道/洞穴狭小空间作业、危害气体检测等领域上也具有潜在使用价值。
[0068]
在一实施例中,安装座包括多个连接杆17和依次设置且相互平行的第一支撑板11、第二支撑板12和第三支撑板13,第一支撑板11和第二支撑板12连接,连接杆17的两端分别与第二支撑板12和第三支撑板13连接,飞爬控制模块14安装于第一支撑板11上,调节模块15穿设于第二支撑板12上,电池16位于第二支撑板12和第三支撑板13之间。需要说明的是,安装座还可为任意结构形状。
[0069]
在一实施例中,旋翼组件2还包括与电机22连接的限位支撑板23,用于实现与旋翼组件2所连腿节的转动限位。限位支撑板23连接于对应的电机22和腿节之间,通过限位作用保护旋翼组件2不受损。
[0070]
在一实施例中,腿节为两个,包括大腿节32和小腿节34,关节驱动舵机为两个,包括髋关节驱动舵机31和膝关节驱动舵机33,髋关节驱动舵机31与安装座连接,并用于驱动大腿节32绕安装座水平摆动,膝关节驱动舵机33用于驱动小腿节34绕大腿节32上下摆动,轮腿切换组件35设于小腿节34的末端。安装座的四角可设有固定座121,髋关节驱动舵机31安装于固定座121内,通过关节驱动舵机驱动大腿节32和小腿节34实现腿部组件3的双自由度运动,且还可根据实际需求调整腿部组件3的腿节和关节驱动舵机的数量,以实现不同的应用需求。旋翼组件2设置于小腿节34上,通过调节小腿节34实现旋翼组件2方向调整。
[0071]
在一实施例中,大腿节32的水平摆动范围为180
°
,小腿节34的上下摆动范围为90
°
。或还可根据实际需求调整运动范围。
[0072]
在一实施例中,各螺旋桨21在水平状态下沿高度方向错位分布。本实施例中,螺旋桨21在空中飞行模式下处于同一水平面。或还可通过螺旋桨21高低错落设计保证正常运行的情况下有助于进一步缩小机器人尺寸。
[0073]
在一实施例中,螺旋桨21还设有筒状保护罩,并通过螺旋桨21推进实现筒状保护罩的轮式运动或吸附运动。如当筒状保护罩与螺旋桨21同步转动时,螺旋桨21调节为垂直状态,筒状保护罩功能可切换为轮子,在螺旋桨21的推进下实现轮式运动;或当螺旋桨21调节为倒置状态,在螺旋桨21的推进下实现吸附运动功能。
[0074]
在一实施例中,脚掌352的末端设有爪刺机构或黏附机构。爪刺机构或黏附机构可为现有技术中常见的机器人末端执行器,用于实现抓取或黏附功能,如夹爪或吸盘等,可以实现在不同材质表面的垂直运动或吸附。
[0075]
在一实施例中,可变形小型四旋翼四足飞爬机器人搭载有视觉传感器、听觉传感器、嗅觉传感器和触觉传感器至少其一,各传感器与飞爬控制模块14电连接。各传感器的种类、数量和型号根据实际需求确定,通过设置传感器使机器人具备对环境的感知能力,提高智能化水平。
[0076]
实施例2:
[0077]
如图10所示,一种可变形小型四旋翼四足飞爬机器人的控制方法,包括如下步骤:
[0078]
s1、分别构建飞爬机器人的四旋翼动力学模型和四足动力学模型;
[0079]
s2、采用在线系统辨识方法确定四旋翼动力学模型在不同飞行运动模态下的螺旋桨升力系数k
t
;
[0080]
s3、确定空中飞行模式的飞行运动模型,飞行运动模型包括静态飞行运动模型和动态飞行运动模型,静态飞行运动模型采用“前馈+pd反馈”控制方式来实现四旋翼动力学模型的“x”型飞行运动模态,动态飞行运动模型采用升力补偿算法来实现四旋翼动力学模型的“t”型、“h”型或“o”型飞行运动模态,其中:
[0081]“前馈+pd反馈”控制方式满足如下公式:
[0082][0083]
式中,u(t)为四旋翼动力学模型的输入量,x(t)为四旋翼动力学模型的状态量,e(t)为四旋翼动力学模型的误差量,为与四旋翼动力学模型相关的常系数,k
p
为控制器的比例系数,kd为控制器的微分系数,为前馈项,为pd反馈项;
[0084]
升力补偿算法满足如下公式:
[0085][0086][0087]
t=k(φ)w2[0088]
式中,t为单个螺旋桨的升力,φ为螺旋桨变形后的遮挡角度,ω为螺旋桨的角速度,k(φ)为遮挡角度相关函数,为补偿后的期望电机速度,k是取决于遮挡角度相关函数k(φ)的伸缩因子,k
t
为升力系数且等于k(φ=0);
[0089]
s4、采用双层cpg网络和最近邻耦合模型来控制四足动力学模型的足端运动轨迹,
双层cpg网络包括八个振荡器,并划分为用于控制髋关节的意识层和用于控制膝关节的行为层,最近邻耦合模型为:
[0090][0091]
其中,旋转矩阵定义为:
[0092][0093]
式中,i=1,2,3,4,j=1,2,m=1,2,3,4,n=1,2,x
mn
和y
mn
表示第m条腿部组件第n个关节的振荡器状态量,k’为耦合强度,且等于0.1,表示第mn个振荡器和第ij个振荡器之间的相位差;
[0094]
s5、基于ddpg强化学习算法训练双层cpg网络,获得训练好的行为层模型参数,ddpg强化学习的奖励函数r
t
公式如下:
[0095][0096]
其中,kv为正的速度权重系数,ke为正的扭矩权重系数,v
x
为水平速度,τ为关节扭矩,为关节角速度;
[0097]
s6、飞爬机器人根据实时采集的环境信息实现定位并构建地图进行路径规划,通过自适应地选择飞行运动模型或训练好的双层cpg网络控制飞爬机器人实现空中飞行运动或地面爬行运动。
[0098]
其中,飞爬机器人的陆空自主切换控制流程,主要包括运动规划和运动控制。机器人通过机载传感器对环境的感知进行信息采集,飞爬控制模块接收到传感器反馈的信息后实现定位并构建地图,通过定位和构建地图进行路径规划,可通过现有技术中路径规划方法优化轨迹(包括陆地运动路径和空中运动路径),飞爬机器人按照规划好的轨迹运动,考虑地形变化,进行跨域运动轨迹的规划与控制,可优先搜索地面模态以降低飞爬机器人的能耗。对于空中运动和陆地运动分别在gazebo平台下构建飞爬机器人的四旋翼动力学模型和在matlab平台下构建四足动力学模型。
[0099]
(1)空中飞行模式采用“前馈+pd反馈”控制方式的静态飞行控制方法或采用基于升力补偿算法的可变形动态飞行控制方法控制四旋翼动力学模型。
[0100]
该飞爬机器人通常具有四种类型的飞行姿态,包括“x”型、“o”型、“h”型、“t”型。飞行控制可以分为静态四旋翼控制(不变形)和动态可变形控制(进行动态变形)。
[0101]
在静态四旋翼控制下,提出了一种基于动力学模型的“前馈+pd反馈”控制律:
[0102][0103]
其中,u(t)为四旋翼动力学模型的输入量,x(t)为四旋翼动力学模型的状态量,e
(t)为四旋翼动力学模型的误差量,为四旋翼动力学模型的常系数,k
p
为控制器的比例系数,kd为控制器的微分系数,为前馈项,为pd反馈项。通过将整体控制分解成依赖于模型的部分和独立于模型的部分(k
p
和kd),可以直接应用于静态四旋翼的运动控制上。
[0104]
在动态可变形控制下,通过在线系统辨识方法简化可变形四旋翼的建模过程,并利用升力补偿算法来调整旋翼的电机速度,以克服旋翼动态变形带来的升力变化。在线系统辨识方法可采用现有技术中常规方法,如最小二乘法、子空间辨识方法等。
[0105]
为了解决飞爬机器人在飞行姿态变形的过程中造成的升力损失问题,采用几何补偿策略来调整螺旋桨的升力。通过在线系统辨识来确定机器人在不同飞行姿态下的螺旋桨升力系数k
t
,单个螺旋桨的升力模型可以简化为:
[0106]
t=k(φ)ω2[0107]
其中,t为单个螺旋桨的升力,φ为螺旋桨的遮挡角度,ω为螺旋桨的角速度,k(φ)为遮挡角度相关函数。具体可参考文献:a.fabris,k.kleber,d.falanga and d.scaramuzza,"geometry-aware compensation scheme for morphing drones,"2021 ieee international conference on robotics and automation(icra),2021,pp.592-598。
[0108]
螺旋桨遮挡角度越大,升力损失会越多。几何补偿算法的研究目的是调整飞爬机器人的旋翼电机速度,以保证变形前后维持相同的期望升力。假设已知飞爬机器人的飞行模态为“o”型,可以将其视为比“x”型尺寸更小的对称四旋翼,由于螺旋桨和机身之间的重叠造成升力损失,所以旋翼的角速度必须相应增加,升力补偿后的螺旋桨角速度模型(升力补偿模型)可以表示为:
[0109][0110][0111]
其中,为补偿后的期望电机速度,k是取决于遮挡角度相关函数k(φ)的伸缩因子,k
t
为升力系数且等于k(φ=0)。
[0112]
(2)地面爬行模式基于中枢模式发生器(双层cpg网络)和最近邻耦合模型+强化学习方法控制四足动力学模型。
[0113]
腿部组件3为仿生足,与动物的运动行为类似,普遍采用节律运动方式,它由位于脊髓中的中枢模式发生器(cpg)控制,且这个控制过程是由中枢神经系统分层控制的。
[0114]
为了降低强化学习对高维关节模态优化的时间复杂度和空间复杂度,采用一个两层的cpg(8个振荡器)拓扑网络来产生不同的运动模态。其中,cpg的第一层(髋关节,如对应大腿节)作为意识层,负责固定机器人的基本运动模态(例如对角模态、小跑模态、跳跃模态等),通过对四足机器人的运动学分析设置该层的模态参数,产生期望的基本运动模态,可采用现有技术实现;cpg的第二层(膝关节,如对应小腿节)作为行为层,负责控制机器人的
肢体行为,采用一种基于深度确定性策略梯度(deep deterministic policy gradient,ddpg)的强化学习方法来精调该层的cpg参数(如幅值、频率和相位差等参数),优化机器人的实际模态性能以适应复杂环境。
[0115]
飞爬机器人的环境自适应性通过两个指标来衡量:一个是机器人的前进速度,另一个是机器人的能耗。因此,强化学习的奖励函数r
t
可以简化表示为奖励更大速度和惩罚更高能耗这两项:
[0116][0117]
其中,kv为正的速度权重系数,ke为正的扭矩权重系数,v
x
为水平速度,τ为关节扭矩,为关节角速度。kv·vx
表示速度奖励项,激励机器人尽可能快地向前运动,并不断迭代使机器人可以收敛到某个正速度奖励值;表示能量惩罚项,优化机器人的能量消耗。
[0118]
分层的cpg拓扑网络和最近邻耦合模型(具备单腿结构对称的耦合参数特性)将强化学习需要整定的cpg参数从高维降到低维,因此,相比于直接学习机器人的各个关节命令,该方案更适合于机器人在动态环境下的实际应用。
[0119]
该机器人通过结合空中旋翼组件和地面腿部组件,并将旋翼组件直接集成在腿部组件上形成一体式结构,构成带有四个可旋转腿节的四旋翼飞行器,使机器人自身具有陆空协同作业能力(如行走、飞行、爬壁、操纵和运输物体),兼具了飞行机器人的运动灵活性和足式机器人的地形适应性,能够实现在空中大范围、远距离的全局观察和地面小范围、近距离的精确定位,解决了飞行机器人的隐蔽性差和爬行机器人的移动速度慢的问题,提高了机器人在复杂陆空作业环境下的机动性和适应性,并实现轻量化、小型化、集成化、智能化,且空气阻力小、越障性能好、续航时间长,可满足小型化的侦察需求和复杂陆空环境的作业需求;采用可变形腿部组件并配合旋翼组件在空中飞行时产生不同的运动模态,如“t”型、“h”型、“o”型、“x”型等,根据环境条件自适应地变换相应的飞行运动模态,能够实现穿越狭窄受限区域和对目标物的超近距离观测等特殊操作任务,并具备抓取功能和垂直面爬壁功能;相较于现有技术中单一轮式或单一腿式的陆空两栖机器人,该装置设有轮腿切换组件,通过切换腿部组件的末端为滚轮或脚掌,具备高效灵活的运动速度和地面越障能力;通过建立空中飞行模式不同运动模态下的飞行运动模型并采用基于ddpg强化学习算法训练好的双层cpg网络实现飞爬机器人空地自主切换,产生在不同环境下的运动模态,提高空地运动的稳定性和多样性,实现智能化控制。
[0120]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0121]
以上所述实施例仅表达了本技术描述较为具体和详细的实施例,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 服务器、电力管理系统以及能量...
- 制动装置的制作方法
- 一种基于路侧设备自然驾驶数据...
- 一种换电站充电策略调整系统的...
- 一种车身姿态自调整小车及其姿...
- 车辆座椅调整方法、装置、设备...
- 增强电源管理的制作方法
- 一种新能源汽车能量管理方法、...
- 路径轨迹规划方法、终端及计算...
- 一种无PTC加热器的氢能汽车...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1