一种燃气阀开度自动化识别方法与流程
本发明属于燃气阀控制领域,涉及一种燃气阀开度自动化识别方法。
背景技术:
1、中国专利申请cn110220001a公开的一种用于固体姿轨控发动机燃气调节阀的驱动装置,其为两端限位的调节阀,位置传感器读取得到的阀门全开和全关位置的电压因阀门装配、加工等误差会存在一定偏差。
2、若燃气阀门给定统一的上下限:给定的阀门上下限电压偏小将会导致阀门无法完全打开或关闭,影响阀门推力输出精度。给定的阀门上下限电压偏大会导致因为两端机械限位,导致无法走到给定位置。
3、预先手工寻位:预先手动将阀门旋转到全开和全关位置,记录阀门上下限所对应的电压值,存储到控制器中,若更换阀门,还需要手工进行寻位并更改在控制器中存储的数据,系统的互换性差,使用维护不变。
4、上位机控制指令预先装订:为了实现多个阀门的开度控制,每个阀门开关位置对应的电压不同,需要上位机预先装订控制参数。
5、为了实现燃气调节阀开度自动化识别,不受阀门个体制造差异影响以及解决系统互换性问题,需要对燃气调节阀开度判别方法进行优化,实现自动化和通用化。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出一种燃气阀开度自动化识别方法,实现了自动获取燃气阀门的行程并获取阀门上限和下限对应的电位计电压,解决快速获得燃气阀门行程的问题。
2、本发明解决技术的方案是:
3、一种燃气阀开度自动化识别方法,包括:
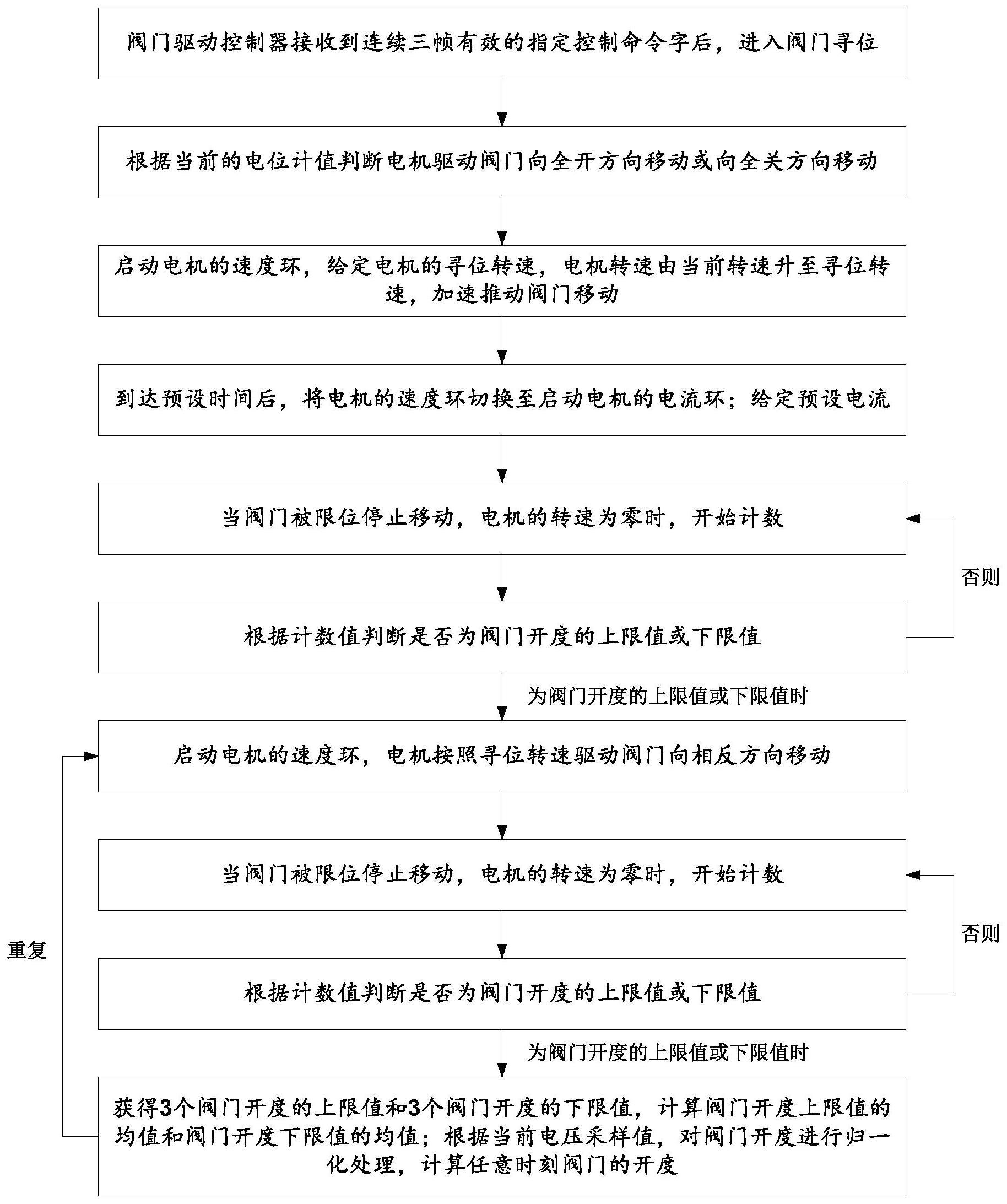
4、步骤一、阀门驱动控制器接收到连续三帧有效的指定控制命令字后,进入阀门寻位;
5、步骤二、根据当前的电位计值判断电机驱动阀门向全开方向移动或向全关方向移动;
6、步骤三、阀门驱动控制器通过控制电机驱动阀门移动;启动电机的速度环,给定电机的寻位转速,电机转速由当前转速升至寻位转速,加速推动阀门移动;
7、步骤四、到达预设时间后,将电机的速度环切换至启动电机的电流环;并给定预设电流;
8、步骤五、当阀门被限位停止移动,电机的转速为零时,开始计数;
9、步骤六、根据计数值判断是否为阀门开度的上限值或下限值;当判断为阀门开度的上限值或下限值时进入步骤七,否则返回步骤五;
10、步骤七、启动电机的速度环,电机按照寻位转速驱动阀门向相反方向移动;到达预设时间后,将电机的速度环切换至启动电机的电流环;并给定预设电流;
11、步骤八、当阀门被限位停止移动,电机的转速为零时,开始计数;
12、步骤九、根据计数值判断是否为阀门开度的上限值或下限值;当判断为阀门开度的上限值或下限值时进入步骤十,否则返回步骤八;
13、步骤十、重复步骤七至步骤九,获得3个阀门开度的上限值和3个阀门开度的下限值,计算阀门开度上限值的均值和阀门开度下限值的均值;根据当前电压采样值,对阀门开度进行归一化处理,计算任意时刻阀门的开度k。
14、在上述的一种燃气阀开度自动化识别方法,所述步骤二中,根据当前的电位计值判断电机驱动阀门移动方向的方法为:
15、当电位计值大于4v时,电机驱动阀门向全关方向移动;当电位计值小于等于4v时,电机驱动阀门向全开方向移动。
16、在上述的一种燃气阀开度自动化识别方法,所述步骤四中,预设时间为50ms。
17、在上述的一种燃气阀开度自动化识别方法,所述步骤五中,计数时,每间隔2.5ms计数值加1。
18、在上述的一种燃气阀开度自动化识别方法,所述步骤六中,当步骤二中阀门向全关方向移动时,为阀门开度的下限值;当步骤二中阀门向全开方向移动时,为阀门开度的上限值。
19、在上述的一种燃气阀开度自动化识别方法,所述步骤六中,根据计数值判断的方法为:
20、当累积计数值不小于50时,则判断阀门已到达全开或全关的限位位置,此时位置传感器测得的数值即为上限值或下限值;当累积计数值小于50时,判断阀门由于其他因素停止一端时间后继续移动,还未到达全开或全关的限位位置。
21、在上述的一种燃气阀开度自动化识别方法,所述步骤七中,预设时间为50ms。
22、在上述的一种燃气阀开度自动化识别方法,所述步骤九中,当步骤二中阀门向全关方向移动时,步骤九中为阀门向全开方向移动,为阀门开度的上限值;当步骤二中阀门向全开方向移动时,步骤九中为阀门向全关方向移动,为阀门开度的下限值。
23、在上述的一种燃气阀开度自动化识别方法,所述步骤九中,根据计数值判断的方法为:
24、当累积计数值不小于50时,则判断阀门已到达全开或全关的限位位置,此时位置传感器测得的数值即为上限值或下限值;当累积计数值小于50时,判断阀门由于其他因素停止一端时间后继续移动,还未到达全开或全关的限位位置。
25、在上述的一种燃气阀开度自动化识别方法,所述步骤十中,对阀门开度进行归一化处理的方法为:
26、
27、式中,ui为当前电压采样值;
28、u1为阀门开度下限值的均值对应的电压值;
29、u2为阀门开度上限值的均值对应的电压值。
30、本发明与现有技术相比的有益效果是:
31、(1)本发明采用了当电位计值大于4v时,电机驱动阀门向全关方向移动;当电位计值小于等于4v时,电机驱动阀门向全开方向移动的判断电机驱动阀门向全开方向移动或向全关方向移动,确定了阀门移动的初始方向,4v电压值的设定也满足阀门推力输出精度;
32、(2)本发明当阀门到达阀门开度的上限值或下限值后,并对计数值提供了创新的判读逻辑,50的计数足以排除由于故障或干扰导致的阀门移动暂缓的干扰因素;
33、(3)本发明经过三次寻位,得到上下限行程取平均,同时根据当前电压采样值对阀门开度进行归一化处理,实现了阀门的精确寻位。
技术特征:
1.一种燃气阀开度自动化识别方法,其特征在于:包括:
2.根据权利要求1所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤二中,根据当前的电位计值判断电机驱动阀门移动方向的方法为:
3.根据权利要求1所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤四中,预设时间为50ms。
4.根据权利要求1所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤五中,计数时,每间隔2.5ms计数值加1。
5.根据权利要求1所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤六中,当步骤二中阀门向全关方向移动时,为阀门开度的下限值;当步骤二中阀门向全开方向移动时,为阀门开度的上限值。
6.根据权利要求5所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤六中,根据计数值判断的方法为:
7.根据权利要求1所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤七中,预设时间为50ms。
8.根据权利要求1所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤九中,当步骤二中阀门向全关方向移动时,步骤九中为阀门向全开方向移动,为阀门开度的上限值;当步骤二中阀门向全开方向移动时,步骤九中为阀门向全关方向移动,为阀门开度的下限值。
9.根据权利要求8所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤九中,根据计数值判断的方法为:
10.根据权利要求1所述的一种燃气阀开度自动化识别方法,其特征在于:所述步骤十中,对阀门开度进行归一化处理的方法为:
技术总结
本发明涉及一种燃气阀开度自动化识别方法,属于燃气阀控制领域;在接收到指定控制命令字且连续三帧有效后进行阀门寻位功能。启动速度环,给定寻位的转速后,阀门向全开的方向进行运动,在运行时间达到50ms后切换到电流环,给定电流的配置值,在电机的速度为零后,记录该时刻的位置传感器的数值为寻位的上限值;启动速度环,使阀门按相同速度向另一方向运行,运行50ms后切换到电流环,给定电流配置值,在电机堵转后记录此刻位置传感器的值为下限值;对三次寻位上限和下限取平均值,同时对阀门开度进行归一化处理,并结束阀门寻位;本发明实现了自动获取燃气阀门的行程并获取阀门上限和下限对应的电位计电压,解决快速获得燃气阀门行程的问题。
技术研发人员:朱朝浥,侯文国,牛禄,杨超,殷睿
受保护的技术使用者:上海新力动力设备研究所
技术研发日:
技术公布日:2024/1/15
- 金属管道自动爬行式TOFD电...
- 一种加固耐磨的洗衣机轴承座的...
- 多模态多自由度的压电主动隔振...
- 一种可以自动安平的基座的制作...
- 一种具有防倒流控制功能的电动...
- 一种气动三通阀的制作方法
- 一种具有润滑功能的轴承的制作...
- 一种连接稳固的汽车轮胎螺栓的...
- 一种法兰盘的连接机构的制作方...
- 一种用于制冷系统的铜铝接头的...
- 还没有人留言评论。精彩留言会获得点赞!